Jan C Somer first published on electronic sector scanning for ultrasonic diagnosis in 1968 in the Journal: Ultrasonics. The principle of phased-arrays had probably been known much earlier where the techniques were engaged in underwater submarine warfare and hence the technology was kept confidential. In England, DG Tucker at the Birmingham University had published on related work around the same time and it was known that Tom Brown at Kelvin and Huges had filed an application for patents of an annular dynamically focused transducer system as early as 1959.
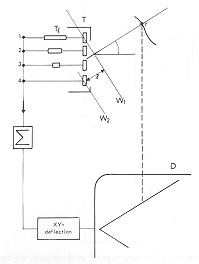
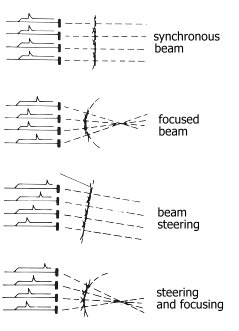
In the phased-array system, all the elements of an array were used for each interrogation pulse and variable time delays were introduced between the various elements, both on transmission and reception, in such a way that effective launching and reception of an acoustic wave occurred predominantly in one defined direction. The scanning process then involved steering of the beam by appropriately varying the individual time delays.
Thurstone and Olaf von Ramm at the Duke University in 1976 published more advanced version of the electronically steered arrays. The array was capable of generating ten different receive foci. In this device the beam was not only steered by manipulation of relative time delays but also, in the receive mode, dynamically focused in such a manner that the electrically determined focal length of the array was swept outwards during each interrogation cycle. This function was acheived by varying the relative time delays, applied to the signals received by each element, in such a way that the effective focal length of the array continously corresponded with the instantaneous value of the range from which echoes were being received (see below). The design was considered to be a pioneering and very important phased-array design at that time.
More about Linear and Phased arrays (a comparison):
The linear array transducer can have up to 512 elements spaced over 75-120 mm. The beam produced by such a narrow element will diverge very rapidly after the wave travels only a few millimeters (the smaller the face of the transducer, the more divergent). This would result in poor lateral resolution due to beam divergence and low sensitivity due to the small element size.
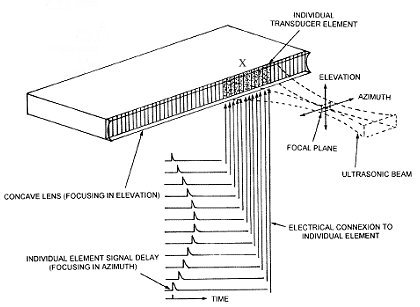
In order to overcome this, adjacent elements typically 8 to 16 (more in wide-aperture designs), are pulsed simultaneously. In the subgroup of X elements, pulsing of the inner elements is delayed with respect to the outer elements. A focused beam results from the interference of the X small divergent wavelets. The time delays determines the depth of focus for the transmitted beam and can be changed during scanning. The same delay factors are also applied to the X elements during the receiving phase resulting in a dynamic focusing effect on return. In this manner, a single scan line in the real-time image is formed. To generate the next adjacent scan line, another group of X elements is formed by shifting one element position along the transducer array from the previous group. The same pattern is then repeated for this set of X elements and all other sets along the array, in a sequential and repetitive manner.
Source: Ultrasonic Imaging of the Human Body. PNT Wells. Rep. Prog. Phys.62 (1999) 671.
Off-axis beam artifacts were a significant problem in the early linear array designs,. These were the side product of grating lobes which resulted from ultrasound beams that emulated at predictable angles off-axis to the main beam. Grating lobes are unique to array transducers and are caused by the regular, periodic spacing of the small array elements. When the energy of these lobes is reflected by off-axis structures and detected by the transducer, the signal produced is artifactual and produce "ghost images" blurring the main image. To overcome this problems each individual element has been subdivided into a half wavelength wide. This effectively eliminated the grating lobes by increasing the angle to greater than 90 degrees. Eliminating grating lobes also improves the signal-to-noise ratio by increasing the size of the main lobe energy relative to the background energy. This further improves image contrast.
Linear array systems are capable of lateral resolution on the order of less than 1 mm. Axial resolution of 1 mm is always possible depending on the frequency of the system. A "wide aperture" array design means that pulses from a large number (say 128) or all the elements are used to form each scan line. At each line, a different delayed pulse sequencing of the whole array of elements is required to form the unique interference pattern, resulting in a highly focused ultrasound beam perpendicular to the transducer face. Since a unique delay pattern for all the elements is required to produce each scan line, highly sophisticated computer-controlled electronics are required. Lateral resolution of less than 0.5 mm can be achieved.
Annular sector transducer construction varies. All designs sweep the ultrasound beam through a pie-shaped wedge or sector with an opening angle ranging from 30 to 100 degrees. The limited view of superficial structures by sector scanners is offset by their high maneuverability and their ability to visualize large areas at greater depths through small acoustic windows. The mechanical designs enclose the transducer in a fluid-filled case with a flexible membrane that provides acoustic coupling with the skin. The electronically steered-beam, phased-array works in the same principles as the linear sequenced array. Its primary use has been in cardiac imaging where low-amplitude echoes from grating lobe and side lobe artifacts are rejected without loss of significant diagnostic information. However these low-amplitude echoes from diffuse scattering events in soft tissues are essential for imaging in the abdomen and the gravid uterus. Phased-array transducer has not been extensively iused compared with the linear sequenced arrays for general ultrasound scanning.
The "steered-beam, phased-array" system requires a unique total element pulse sequence for each scan line (typically 128) since each line has its own unique angle with respect to the transducer face in the sector format. The complexity of the newer designs requires sophisticated, high-speed, computer-controlled pulsing of the individual elements circuitry. Electronic focusing on both transmit and receive (similar to annular array designs) provides a longer focal zone with a narrower beam width than conventional single element designs. Similar to linear array designs, focusing in the direction at right angles to the scan plane determines the slice thickness and is accomplished by use of accoustic lens. Since the beam path is electronically controlled, the direction (vector) of each A-line can be selected at random. This unique advantage over mechanical designs allows the system to perform "simultaneous" B-mode imaging and M-mode or Doppler functions.
One of the chief
difficulties associated with multiplexer or switching network delay control was the noise
injected into the signal when the system changed delays. As a result, expensive, high
quality, low noise delay lines and multiplexers were needed in the scanner to produce
high quality images. Also, for effective dynamic focusing the delay resolution on every
channel must be a small fraction of the ultrasound carrier period. This meant delay lines
contained many (hundreds) of taps that complicated manufacture. The cost of these high
precision, high bandwidth, analog components made large channel count systems
prohibitive.
In 1979, Samuel Maslak, then at Hewlett Packard (HP), patented a method for dynamic
delays without changing delay taps. By heterodyning the RF signal from each
channel to an intermediate frequency, a phase manipulating circuit could perform fine
delay changes while a coarse delay line held a large constant delay. In this way, the
imaging system created multiple receive foci without expensive ultra-low noise delay
lines.
Electronic focusing in the plane along the line of the transducer elements improves lateral resolution as well as sensitivity by increasing the amount of energy in the focal zone. Focusing in the direction at right angles to the scan plane determines the slice thickness and can also be accomplished by use of an external acoustic (light) lens resulting in double enhanced focussing. A unique advantage of electronically focused transducers is the ability to change the depth of the focal zone simply by changing the amount of delays applied to the individual elements. Using pushbutton controls (like in the early ADR), the focal zone can be scanned through a specified range of depths during the real-time exam.
 The development of 64- and 128-element "steered-beam, phased-array" systems appeared promising for solving the grating lobe artifact problem and improving the signal-to-noise ratio. The electronic complexity is several orders of magnitude greater than that required for conventional linear array systems. All the array elements (64 or 128) must be selectively pulsed to form the wavefront for a single scan Iine. In contrast, only X elements (typically 8 to 16) of the total number of elements (typically 128) are selectively pulsed to form a scan Iine for the common linear designs. Also, the linear array system simply moves the same X elements pulse sequence along the entire array to form parallel focused scan Iines.
The development of 64- and 128-element "steered-beam, phased-array" systems appeared promising for solving the grating lobe artifact problem and improving the signal-to-noise ratio. The electronic complexity is several orders of magnitude greater than that required for conventional linear array systems. All the array elements (64 or 128) must be selectively pulsed to form the wavefront for a single scan Iine. In contrast, only X elements (typically 8 to 16) of the total number of elements (typically 128) are selectively pulsed to form a scan Iine for the common linear designs. Also, the linear array system simply moves the same X elements pulse sequence along the entire array to form parallel focused scan Iines.
Back to History of Ultrasound in Obstetrics and Gynecology.